五级流水线数据通路
DONE
单周期数据通路
- ALU
- 32 个 32 位寄存器
- 数据存储器
- 取指令
- 控制器
Verilog 相关
- 读取十六进制文本为内存中的数据
initial begin $readmemh(filePath, localRegister, startAddr, endAddr);end- 使用命令行进行仿真
iverilog -o testbench testbench.v # 编译 testbenchvvp testbench # 运行,即仿真gtkwave wave.vcd # 查看波形reg [31:0] Mem [63:0]的含义 表示 32 位的寄存器组,共有 64 个寄存器单元,即前面表示存储单元宽度,后面表示存储单元个数
汇编代码转 16 进制代码
通过 python 字符串处理以及正则表达式将 MIPS 的 11 条汇编指令代码翻译为 32 位机器码
TODO
1. 流水线数据通路
核心部件
4 个部件
- IUnit
- RFile
- ExecUnit
- DataMem
4 个状态寄存器 + PC
| 寄存器 | 需要保存的状态 |
|---|---|
| PC Reg | PC,newpc |
| IF/ID Reg | PC+4,Instruction |
| ID/Ex Reg | PC+4,Imm,Rt,Rd,busA,busB |
| Ex/Mem Reg | PC+4,Zero,busB,Result,RtRdDst |
| Mem/Wr Reg | DataOut,Result,RtRdDst |
2. 控制冒险(采用静态分支预测的方法)
2.1. Branch & Zero
在 beq 指令中,原本需要运行到 exec 周期结束时,才能得到 Zero 信号,但如果在前面的 Reg/Dec 阶段,将从 Rs, Rt 中取出的数进行异或,得到的结果每位或,就可以得到 Zero 的信号。也就是说,在先一个周期就可以提前得到这个信号,判断是否需要解决。与此同时,branch 的新地址已经送到 newpc 处。
此时,beq 的下一条指令还在 IFetch 阶段,得到了这一条指令。如果 beq 需要跳转,则将这一条已经取出的指令进行 bubble 处理,即只需去除一条指令,接下来的指令不会受到影响
本部分来自 ppt
- 缩短分支延迟,减少错误预测代价
- 可以将 “转移地址计算”和“分支条件判断”操作调整到 ID 阶段来缩短延迟
- 是可能的:IF/ID 流水段寄存器中已经有PC的值和立即数)
- 用逻辑运算(如,先按位异或,再结果各位相或)来直接比较Rs和Rt的值) ( 简单判断用逻辑运算,复杂判断可以用专门指令生成条件码) (许多条件判断都很简单)
- 可以将 “转移地址计算”和“分支条件判断”操作调整到 ID 阶段来缩短延迟
- 预测错误的检测和处理(称为“冲刷、冲洗” — Flush)
- 当 Branch=1 并且 Zero=1 时,发生转移(taken)
- 增加控制信号:IF.Flush=Branch and Zero,取值为 1 时,说明预测失败
- 预测失败 (条件满足) 时,完成以下两件事(延迟损失时间片C=1时):
- 将转移目标地址->PC
- 清除 IF 段中取出的指令,即:将 IF/ID 中的指令字清 0,转变为 nop 指令
2.1.1. Branch & Zero 信号和目标地址的生成
该部分在 IF/ID 之后完成
// PC+4 和 imm16 在 IF/ID 寄存器出现wire [31:0] bz_target_ahead;wire [31:0] imm32_ahead;extender ext_bz_ahead( .im (si_im), .ExtOp (ExtOp), .Im (imm32_ahead));assign bz_target_ahead = if_id_pc_inc_out + (imm32_ahead << 2);
// Branch 在 Controller 中给出// Zero 通过异或给出wire zero_ahead;wire bz_ahead;assign zero_ahead = (busA ^ busB) == 31'b0;assign bz_ahead = zero_ahead & Branch;得到这两条信号 bz_target_ahead,bz_ahead 之后,将这两根线替换掉原来在 Exec 部件之后生成的 Branch 信号线。
2.2. Jump
当 jump 指令到来,且得到需要真正跳转的信号时,下一条指令恰好在 IFetch 阶段,与此同时新的 PC 已经被送到 upc 部件。因此,该过程需要对这一条已经在 IF 阶段的指令进行 bubble 处理。
2.2.1. Jump 信号和地址的生成
该部分在 IF/ID 之后完成
// Jump 信号在 Controller 中给出// jump_target_pc 目标地址通过 PC 高 4 位,指令 26 位立即数,两个 0 拼接而成wire [31:0] jump_target_pc;assign jump_target_pc = {u_pc_pc_out[31:28], Instruction[25:0], 2'b00};得到 Jump 信号和 jump_target_pc 后,将这两根线替换原来在 Exec 部件之后和 Branch 信号线通过 mux 得到的线。
2.3. 等一下,似乎有什么可以并在一起的处理
在上面的讨论中,BZ 和 Jump 在跳转时均需要 bubble 下一个周期的指令,也就是说,可以定义一个 IF_flush 指令,IF_flush = bz | Jump,用于控制 IF/ID 寄存器的一次 bubble,以合并一部分处理。
另外,PC+4, bz_target_ahead, jump_target_pc 似乎可以用一个 32 位 mux3to1 多路选择器来选择。
2.3.1. IF_flush 和下一条指令的 bubble
wire IF_flush;assign IF_flush = bz_ahead | Jump;assign if_id_bubble = IF_flush;// 暂时先这么写,在之后或许会碰到其他的信号,也需要控制这个 bubble 信号3. 数据冒险
3.1. 连续需要用到同一个寄存器的数据冒险
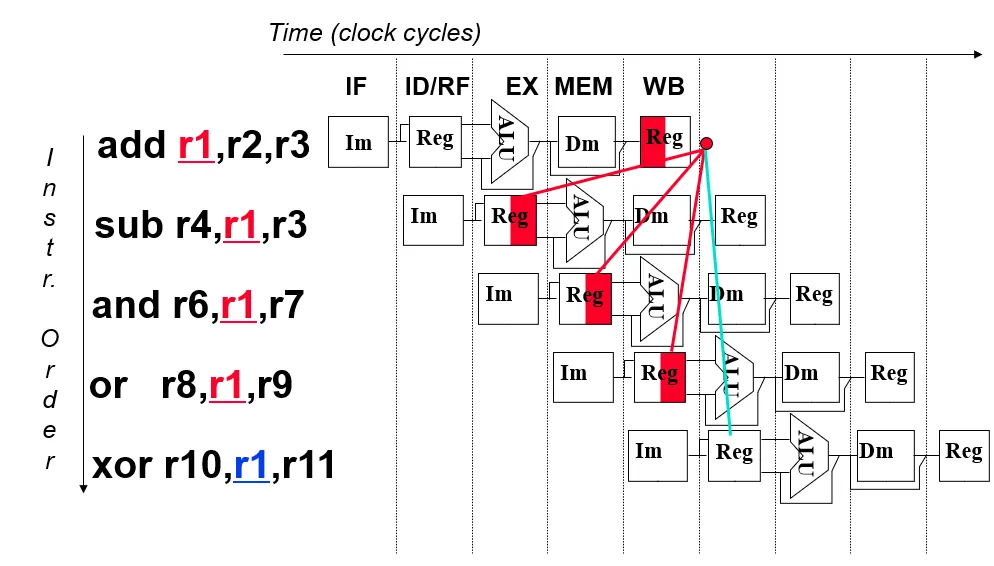
图中,若按照单周期的处理方式,仅能使得最后一条指令得到正确的结果。通过寄存器、存储器的前半周期写,后半周期读,解决了部分的冒险,可以使第 4 条指令也能够取到正确的数。
图中的第二、第三条指令在没有冒险处理的情况下无法得到正确的数,因此需要转发来处理冒险。
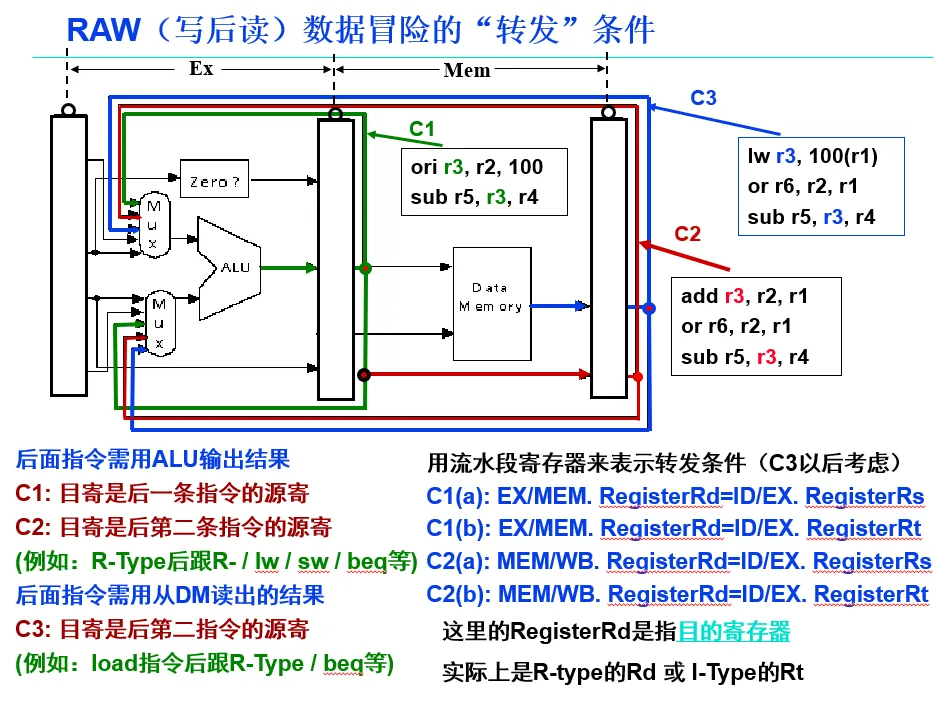
转发(Forwarding 或 Bypassing 旁路)技术
- 若相关数据是ALU结果,则如何?
- 可通过转发解决
- 若相关数据是上条指令 DM 读出内容,则如何?(Load-use 数据冒险)
- 不能通过转发解决,随后指令需被阻塞一个时钟或加 NOP 指令

把数据从流水段寄存器中直接取到 ALU 的输入端 ^data-hazard
- 第一行指令的 EX 阶段得到的结果,直接转发到第二行指令的 EX 输入端
- 需要将寄存器
r_exec_mem的ex_me_ALUout_out转发至u_exec的busA,busB处。
- 需要将寄存器
- 第一行指令的 DM 阶段读出的结果,转发给第三行指令的 EX 输入端
- 需要将寄存器
r_mem_wr的me_wr_ALUout_out转发至u_exec的busA,busB处。
- 需要将寄存器
- Load-use 中的一部分冒险也通过在这里加入转发线来解决
需要在 ALU 的输入端插入一些多路选择器,选择应当输入的数据。
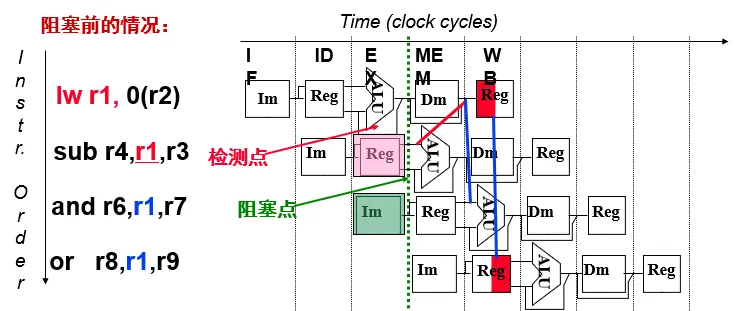
3.2. Load-use 数据冒险
lw 指令需要经过下面的流程才能取到数,数据至少需要在 MEM 阶段之后才能得到。
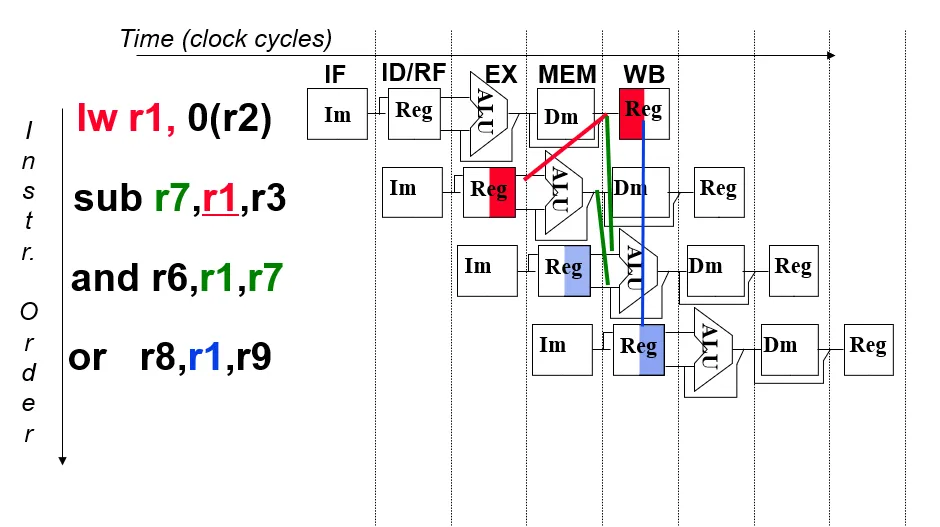
因此,在上面的示例中,lw 指令后紧跟着需要用到的寄存器,则需要使用转发与延迟结合的方法才能正确执行,需要延迟一个周期。
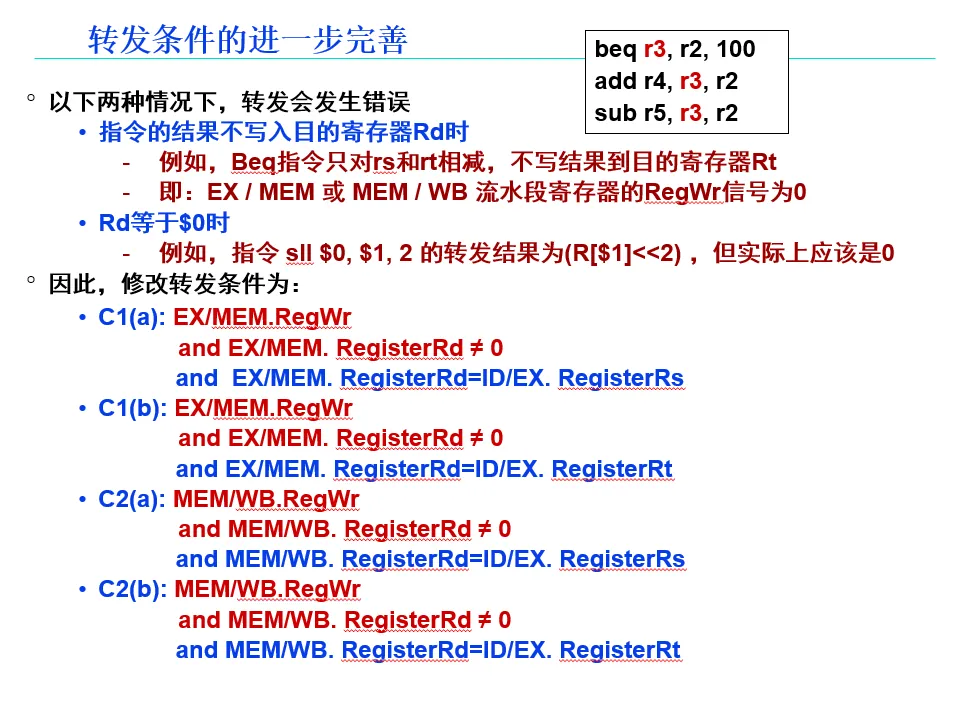
3.2.1. 编写 forward_unit 模块
为解决数据冒险中 ALU 的多个输入,采用 forward_unit 生成多路选择[[#^data-hazard]]
output [1:0] forward_a;output [1:0] forward_b;
wire c1a, c1b, c2a, c2b;
assign forward_a = {c1a, c2a};assign forward_b = {c1b, c2b};
assign c1a = (ex_me_wb) && (ex_me_Rw != 0) && (ex_me_Rw == id_ex_Rs);assign c2a = (me_wr_wb) && (me_wr_Rw != 0) && (ex_me_Rw != id_ex_Rs) && (me_wr_Rw == id_ex_Rs);assign c1b = (ex_me_wb) && (ex_me_Rw != 0) && (ex_me_Rw == id_ex_Rt);assign c2b = (me_wr_wb) && (me_wr_Rw != 0) && (ex_me_Rw != id_ex_Rt) && (me_wr_Rw == id_ex_Rt);TODO: wb 信号为所有需要写回寄存器的信号的“或”,即 RegWr
forward_a 和 forward_b 用于 u_exec 的 busA busB 的多路选择。
forward_a == forward_b = 00: 原输入id_ex_busA_outid_ex_busB_outforward_a || forward_b = 01:me_wr_ALUout_outforward_a || forward_b = 10:ex_me_ALUout_out
wire [31:0] forward_a_target; // busB 输入端类似
mux3to1 #( .k (32)) m_forward_a ( .U (id_ex_busA_out), .V (me_wr_ALUout_out), .W (ex_me_ALUout_out), .Selm (forward_a), .F (forward_a_target));3.2.2. 编写 hazard_detection_unit 模块
硬件阻塞方式,需要判断何时进行阻塞
- 前面为
lw指令,并且前面指令的目的寄存器等于当前刚取出指令的源寄存器,即stall = id_ex_MemtoReg && (id_ex_Rt == if_id_Rs || id_ex_Rt == if_id_Rt)
如何修改数据通路实现阻塞
- 检测“阻塞”过程中
- sub 指令在 IF/ID 寄存器中,并正被译码,控制信号和 Rs/Rt 的值将被写到 ID/EX 段寄存器
- and 指令地址在 PC 中,正被取出,取出的指令将被写到 IF/ID 段寄存器中
- 在阻塞点,必须将上述两条指令的执行结果清除,并延迟一个周期执行这两条指令
- 将 ID/EX 段寄存器中所有控制信号清 0 ,插入一个“气泡” (bubble ID/Ex.Reg signals)
- IF/ID 寄存器中的信息不变(还是 sub 指令),sub 指令重新译码执行(stall IF/ID.Reg)
- PC 中的值不变(还是 and 指令地址),and 指令重新被取出执行(stall PC)
module hazard_detection_unit ( input [4:0] id_ex_Rt, input [4:0] if_id_Rs, input [4:0] if_id_Rt, input id_ex_MemtoReg, output stall_out); assign stall_out = id_ex_MemtoReg && (id_ex_Rt == if_id_Rs || id_ex_Rt == if_id_Rt);endmodule