操作系统内核实验
1. 实验内容
修改 Linux 0.00 源代码,使得它能够完成下面的功能
- 增加两个进程,使得整个操作系统有 4 个用户进程
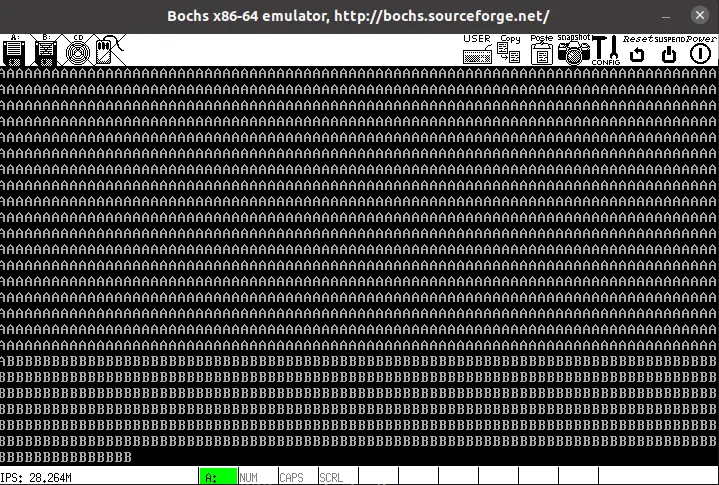
- 修改 write_char 的功能,使得字符输出模式为滚屏
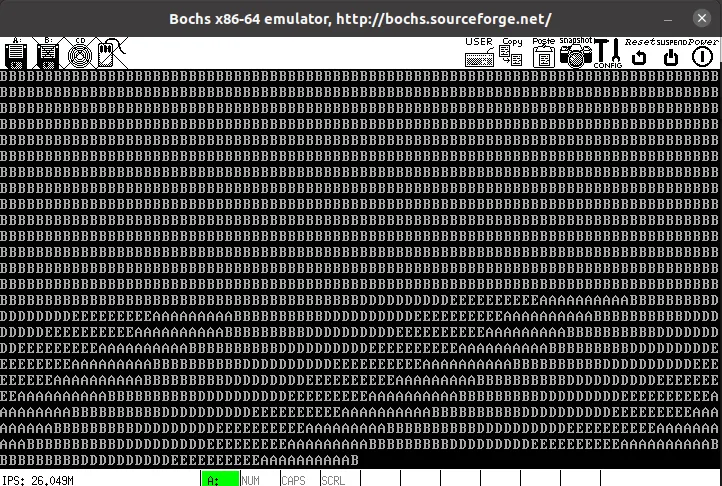
- 增加键盘中断,当按下键盘按键时,能够切换到相应的进程
2. 实验环境
| 项目 | 详情 |
|---|---|
| 实验平台 | Ubuntu 20.04 |
| 开发环境 | gcc-3.4, bin86, i386 等 |
| 环境参考 | https://github.com/Wangzhike/HIT-Linux-0.11.git |
| 实验工具 | bochs, Linux 0.00 源码 |
3. 代码分析
3.1. BOOT.S
BOOT.S 作为磁盘的引导程序,在 PC 启动,进入实模式后,会进行引导,关闭中断,并使得系统进入保护模式。
! now we want to move to protected mode ...ok_load: cli ! no interrupts allowed ! 关中断 mov ax, #SYSSEG mov ds, ax ! ds = 0x10000 xor ax, ax mov es, ax ! es = 0x0 mov cx, #0x2000 sub si,si ! ds : si = 0x10000 : 0000 sub di,di ! es : di = 0x00000 : 0000 rep ! 移动内存,0x10000 => 0x00000 movw mov ax, #BOOTSEG mov ds, ax ! ds = 0x7c00 lidt idt_48 ! load idt with 0,0 lgdt gdt_48 ! load gdt with whatever appropriate
! absolute address 0x00000, in 32-bit protected mode. mov ax,#0x0001 ! protected mode (PE) bit lmsw ax ! This is it ! lmsw是加载机器状态字指令,后接16位寄存器或者内存地址 ! 其功能是用源操作数的低4位加载CR0,也就是说仅会影响CR0的低4位——PE, MP, EM, TS。 jmpi 0,8 ! jmp offset 0 of segment 8 (cs)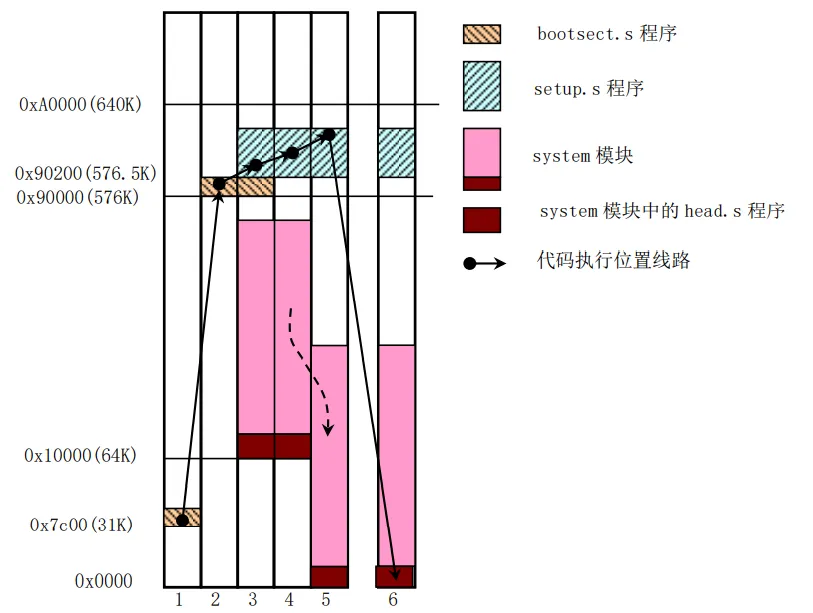
在其间,会将 IDT,GDT 加载。GDT 中,第一段不用,规定代码段和数据段。
gdt: .word 0,0,0,0 ! dummy ! 第1个描述符定义了一个代码段,其基地址为0,界限值是0x7FF(10进制2047), ! 粒度4KB,DPL=0,非一致性,可读可执行。因为粒度是4KB,所以段长度是(2047+1)*4KB=8MB .word 0x07FF ! 8Mb - limit=2047 (2048*4096=8Mb) .word 0x0000 ! base address=0x00000 .word 0x9A00 ! code read/exec 只读 .word 0x00C0 ! granularity=4096, 386 ! 第2个描述符定义了一个数据段,其基地址为0, ! 界限值是0x7FF(10进制2047),粒度4KB,DPL=0,向上扩展,可读可写。同上,段长度是8MB .word 0x07FF ! 8Mb - limit=2047 (2048*4096=8Mb) .word 0x0000 ! base address=0x00000 .word 0x9200 ! data read/write 可读可写 .word 0x00C0 ! granularity=4096, 3863.2. HEAD.S
HEAD.S 是运行在保护模式下的代码,它会加载各个数据段寄存器,重新设置 256 项 IDT,指向一个只会输出字符 C 的哑中断子程序 ignore_int。
setup_gdt: lgdt lgdt_opcode # 加载 GDT ret
setup_idt: lea ignore_int,%edx # 哑中断基址 => %edx movl $0x00080000,%eax # cs = 0x0008 movw %dx,%ax # selector = 0x0008 = cs movw $0x8E00,%dx # interrupt gate - dpl=0, present lea idt,%edi # 中断向量表基址 => %edi mov $256,%ecx # 循环次数rp_sidt: # %eax 中放了 cs:哑中断基址 movl %eax,(%edi) # 将哑中断门描述符存入表中 movl %edx,4(%edi) addl $8,%edi dec %ecx jne rp_sidt # 将 256 个中断全部置为哑中断 lidt lidt_opcode # 加载中断描述符表寄存器值 ret更改 GDT 表,其中需加载进程的 TSS 和 LDT。
gdt: .quad 0x0000000000000000 # NULL descriptor # 第 0 号不用 .quad 0x00c09a00000007ff # 8Mb 0x08, base = 0x00000 # 第 1 号只读代码段 .quad 0x00c09200000007ff # 8Mb 0x10 # 第 2 号可读可写数据段 .quad 0x00c0920b80000002 # screen 0x18 - for display # 第 3 号为显存
.word 0x0068, tss0, 0xe900, 0x0 # TSS0 descr 0x20 .word 0x0040, ldt0, 0xe200, 0x0 # LDT0 descr 0x28 .word 0x0068, tss1, 0xe900, 0x0 # TSS1 descr 0x30 .word 0x0040, ldt1, 0xe200, 0x0 # LDT1 descr 0x38更改 GDT 后重新加载所有的段寄存器,而后初始化 8253 计数器。
在以上工作完成后,重新更改 时钟中断(中断向量号 0x08) 和 系统中断(中断向量号0x80),使得他们能够正常响应。在这一步,其实初始化了内核。
## setup timer & system call interrupt descriptors. movl $0x00080000, %eax # cs = 0x0008 movw $timer_interrupt, %ax # %eax 中放时钟中断基址 movw $0x8E00, %dx # (?) movl $0x08, %ecx # 时钟中断向量号为 08H lea idt(,%ecx,8), %esi # 更改第 8 项中断(每个中断占 8 Byte) movl %eax,(%esi) movl %edx,4(%esi) movw $system_interrupt, %ax # 系统中断基址 movw $0xef00, %dx # 没有做模式切换, 状态没有从 11B 变为 00B (?) movl $0x80, %ecx # 系统中断向量号为 80H lea idt(,%ecx,8), %esi # 更改系统中断 movl %eax,(%esi) movl %edx,4(%esi)最后,为 task0 的启动做一些准备。
## Move to user mode (task 0) 为启动任务 0 做准备 pushfl # eflags 入栈 andl $0xffffbfff, (%esp) # 置 flag, 中断位清零 popfl movl $TSS0_SEL, %eax ltr %ax # 加载 TSS movl $LDT0_SEL, %eax lldt %ax # 加载 LDT movl $0, current # 准备启动 0 sti # 开中断 pushl $0x17 # 压 ss pushl $init_stack # 压用户栈, init_stack 成为 task0 的用户栈 pushfl # 压 eflag pushl $0x0f # 压 cs, cs 末 2 位为 11B, 即进入 11 用户级(00 为内核级) pushl $task0 # 压 eip iret # 返回时自动弹出, 进入 task0, 因此 tss0 表内容得以初始化至此,Linux 0.00 的系统启动完成,task0 开始执行,init_stack 也成为了 task0 的用户栈。在时钟中断发生时,task0 和 task1 会轮流被调度,其过程中会调用系统中断,并输出字符 A 或 B。
4. 具体实现
主要对 HEAD.S 进行修改,实现目标功能。
4.1. 增加两个进程
定义 task2 和 task3 的任务状态段和 LDT。
TSS2_SEL = 0x40 # 任务状态段 2, 占 8 ByteLDT2_SEL = 0x48 # 局部描述符表 2, 占 8 ByteTSS3_SEL = 0x50 # 任务状态段 3, 占 8 ByteLDT3_SEL = 0x58 # 局部描述符表 3, 占 8 Byte在 LDT 和 GDT 加载时,进程的栈空间得以加载,因此需要在 GDT 中增加进程的 TSS 和 LDT 表项。
gdt: .quad 0x0000000000000000 # NULL descriptor # 第 0 号不用 # ... .word 0x0068, tss2, 0xe900, 0x0 # TSS2 descr 0x40 # 进程 2 .word 0x0040, ldt2, 0xe200, 0x0 # LDT2 descr 0x48 .word 0x0068, tss3, 0xe900, 0x0 # TSS2 descr 0x50 # 进程 3 .word 0x0040, ldt3, 0xe200, 0x0 # LDT2 descr 0x58添加进程段,此处展示进程 2 的表项,进程 3 与之类似。
.align 8ldt2: .quad 0x0000000000000000 # 0 号不用 .quad 0x00c0fa00000003ff # 0x0f, base = 0x00000, 1 号只读 .quad 0x00c0f200000003ff # 0x17 2 号可读可写
tss2: .long 0 /* back link */ .long krn_stk2, 0x10 /* esp0, ss0 */ .long 0, 0, 0, 0, 0 /* esp1, ss1, esp2, ss2, cr3 */ .long task2, 0x200 /* eip, eflags */ .long 0, 0, 0, 0 /* eax, ecx, edx, ebx */ .long usr_stk2, 0, 0, 0 /* esp, ebp, esi, edi */ .long 0x17,0x0f,0x17,0x17,0x17,0x17 /* es, cs, ss, ds, fs, gs */ .long LDT2_SEL, 0x8000000 /* ldt 段选择符, trace bitmap */
.fill 128,4,0krn_stk2:添加进程 2 和进程 3 的“主代码”,并定义用户栈。
task2: movl $0x17, %eax movw %ax, %ds # 使用 ldt 表的第 2 项 mov $68, %al # %al 中放入 D 的 ASCII 码 int $0x80 # 调用系统中断, 输出字符 movl $0xfff, %ecx1: loop 1b # 延迟 jmp task2
task3: movl $0x17, %eax movw %ax, %ds # 使用 ldt 表的第 2 项 mov $69, %al # %al 中放入 E 的 ASCII 码 int $0x80 # 调用系统中断, 输出字符 movl $0xfff, %ecx1: loop 1b # 延迟 jmp task3
.fill 128,4,0usr_stk1: .fill 128,4,0usr_stk2: .fill 128,4,0usr_stk3:修改时钟中断处理程序,使之能够在任务 0 到 3 之间轮流调度。
.align 2timer_interrupt: # 时钟中断 (TODO) push %ds pushl %eax # 保护现场 movl $0x10, %eax mov %ax, %ds # 使用 gdt 表的第 2 项 movb $0x20, %al # outb %al, $0x20 # 8259A 恢复中断
movl $0, %eax cmpl %eax, current # 判断当前进程是否为 0 je 1f # 为 0 则跳到 1 处, 切换为进程 1
movl $1, %eax cmpl %eax, current # 判断当前进程是否为 1 je 2f # 为 1 则跳到 2 处, 切换为进程 2
movl $2, %eax cmpl %eax, current # 判断当前进程是否为 2 je 3f # 为 2 则跳到 3 处, 切换为进程 3
movl $3, %eax cmpl %eax, current # 判断当前进程是否为 3 je 4f # 为 3 则跳到 4 处, 切换为进程 0
1: movl $1, current # 设置进程为 1 ljmp $TSS1_SEL, $0 # 跳转到进程 1, 存下当前快照 jmp 5f2: movl $2, current # 设置进程为 2 ljmp $TSS2_SEL, $0 # 跳转到进程 2, 存下当前快照 jmp 5f3: movl $3, current # 设置进程为 3 ljmp $TSS3_SEL, $0 # 跳转到进程 3, 存下当前快照 jmp 5f4: movl $0, current # 设置进程为 0 ljmp $TSS0_SEL, $0 # 跳转到进程 0, 存下当前快照5: popl %eax # 恢复现场 pop %ds iret4.2. 将字符的显示模式更改为“滚屏”
显存的起始地址为 0xb8000,而显示器为 共 2000 个字,每个字的高字节 放 ASCII 码,低字节放显示的颜色。

此处,主要修改 write_char 子程序的代码,思路如下:
- 当光标移动到最下方时,将这些字符全部向上移动一行,并将最下面一行清空
- 将光标移动到最下面一行的行首
write_char: push %gs # 保存现场 pushl %ebx mov $SCRN_SEL, %ebx # 显存的段选择子 mov %bx, %gs # 放入 %gs mov scr_loc, %bx # %bx 中放光标位移(其实是偏移) shl $1, %ebx # 左移, 写高字节(高字节表示 ASCII 码值) movb %al, %gs:(%ebx) # 将 %al 的内容写到光标处 shr $1, %ebx # 右移恢复 incl %ebx # 指针后移 cmpl $2000, %ebx # 与 2000 相比 jb 2f # 如果 ebx < 2000, 则跳转到 2f call roll_screen # 大于等于 2000 时,调用 roll_screen movl $1920, %ebx # 最下面一行的行首2: movl %ebx, scr_loc # 直接将 ebx 赋值给 scr_loc, 返回 popl %ebx # 恢复现场 pop %gs ret
.align 2roll_screen: # ebx >= 2000 时, 将屏幕上的字符向上滚动 push %ds mov $SCRN_SEL, %ebx # 获取显存段地址(0xb8000) mov %bx, %ds mov %bx, %es movl $160, %ebx movl %ebx, %esi # DS:esi (源地址) movl $0, %ebx movl %ebx, %edi # ES:edi (目的地址) movl $1920, %ecx # 循环次数 cld # 清除增量位(向后移动, 即 si <= si + 2, di <= di + 2) rep movsw # 使用 rep 指令前缀, 用 movw 搬动字符
movl $80, %ecx # 将最下面一行清空 pushl %eax movl $0x0700, %eax # 背景色黑, 前景色白, 字符为 00H cld rep stosw # 将 ax 寄存器的内容送到 di 指向的单元中 popl %eax pop %ds ret另外,在进程切换的过程中,也会出现一些例如空行的问题。其原因如下:
- 全局变量
scr_loc代表光标的偏移位置,这个变量为所有进程共享 - 在进程调度时,有可能发生下面的情况:进程 A 还未执行结束,进程 B 就已经抢占了
scr_loc这个共享资源,导致进程 A 没有执行结束(即字符未打印完),而scr_loc的值已经被修改
由于在该系统中还没有涉及到 互斥信号量 的概念,因此只能采用屏蔽中断的方法来进行改善。具体实现方法为:在系统中断调用 write_char 方法的前后分别使用 cli 和 sti 指令关中断和开中断。
4.3. 添加键盘中断
在 HEAD.S 程序中,有一个全局的变量 current,代表着当前处于哪一个进程。在此处我们需要添加一个与键盘相关的标志 key_en 来表示当前处于键盘控制的进程中,不使用时钟中断进行进程的调度。
key_en:.long 0 # 处于键盘中断对应的进程中因此,需要在时钟中断处理程序中,增加判断,若 key_en 为有效值,则直接跳过该处理程序。
timer_interrupt: # ... 保护现场及 8259 恢复中断 movl $0, %eax # 将 key_en 与 false 比较 cmpl %eax, key_en # 若相等,则使用默认的轮流调度 jne 5f # 否则使得某个进程单独被调度(跳出时钟中断处理程序) # ... 进程轮流调度程序5: popl %eax # 恢复现场 pop %ds iret键盘中断处理程序中,通过 0x60 端口读取键盘码,进行比较后调用相应的程序 来处理进程的调度。
.align 2keyboard_interrupt: pushl %edx # 保护现场 pushl %ecx pushl %ebx pushl %eax push %ds push %es
movl $0x10, %eax # 将 ds, es 设置为内核数据段 mov %ax, %ds mov %ax, %es
movb $0x20, %al # 发出 8259 中断结束信号 outb %al, $0x20
xorb %al, %al # 清除 al 和标志位 inb $0x60, %al # 读取端口 cmpb $0x1e, %al # 与 A 的键码比较 je 1f # 切换到进程 0 cmpb $0x30, %al # 与 B 的键码比较 je 2f # 切换到进程 1 cmpb $0x20, %al # 与 D 的键码比较 je 3f # 切换到进程 2 cmpb $0x12, %al # 与 E 的键码比较 je 4f # 切换到进程 3 cmpb $0x2e, %al # 与 C 的键码比较 je 5f # 切换回分时调度 jmp 6f # 这句非常迷惑,但相当关键,相当于 switch 中的 default # 作用是在默认情况下直接退出键盘中断处理程序,否则会默认继续执行下面的程序1: call set_e0 # 切换到进程 0 jmp 6f2: call set_e1 # 切换到进程 1 jmp 6f3: call set_e2 # 切换到进程 2 jmp 6f4: call set_e3 # 切换到进程 3 jmp 6f5: call set_cl # 切换回分时调度6: pop %es # 恢复现场 pop %ds popl %eax popl %ebx popl %ecx popl %edx iret调度程序中,设置 current 的值并使用 ljmp 指令跳转到相应的进程中。
注意:当处于进程 A 时,它不能调度到本身所在的进程,否则就会触发一些错误,导致操作系统重新引导。因此,在调度之前,需要进行一个判断。
.align 8set_e0: movl $1, key_en # 强制进入键盘中断 cmpl $0, current # 判断当前进程是否为 0 je 1f # 若是,则无需进行进程调度 movl $0, current # 指定当前进程为 0 ljmp $TSS0_SEL, $0 # 调度到进程 01: ret
.align 8set_e1: movl $1, key_en # 强制进入键盘中断 cmpl $1, current # 判断当前进程是否为 1 je 1f # 若是,则无需进行进程调度 movl $1, current # 指定当前进程为 1 ljmp $TSS1_SEL, $0 # 调度到进程 11: ret
.align 8set_e2: movl $1, key_en # 强制进入键盘中断 cmpl $2, current # 判断当前进程是否为 2 je 1f # 若是,则无需进行进程调度 movl $2, current # 指定当前进程为 2 ljmp $TSS2_SEL, $0 # 调度到进程 21: ret
.align 8set_e3: movl $1, key_en # 强制进入键盘中断 cmpl $3, current # 判断当前进程是否为 3 je 1f # 若是,则无需进行进程调度 movl $3, current # 指定当前进程为 3 ljmp $TSS3_SEL, $0 # 调度到进程 31: ret
.align 8set_cl: movl $0, key_en # 强制退出键盘中断 ret5. 运行结果
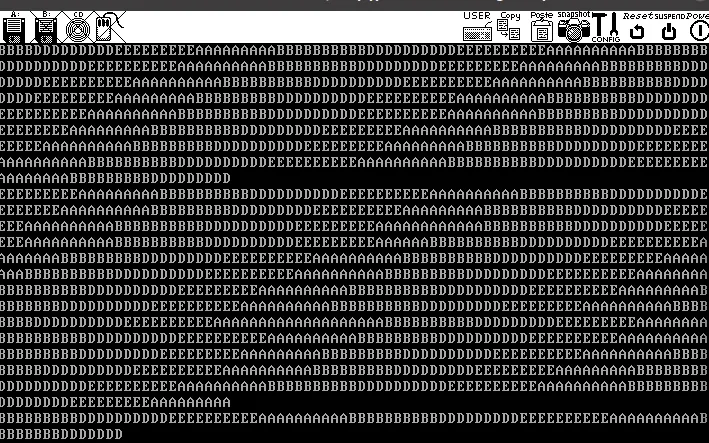
4 个进程轮流调度及滚屏。
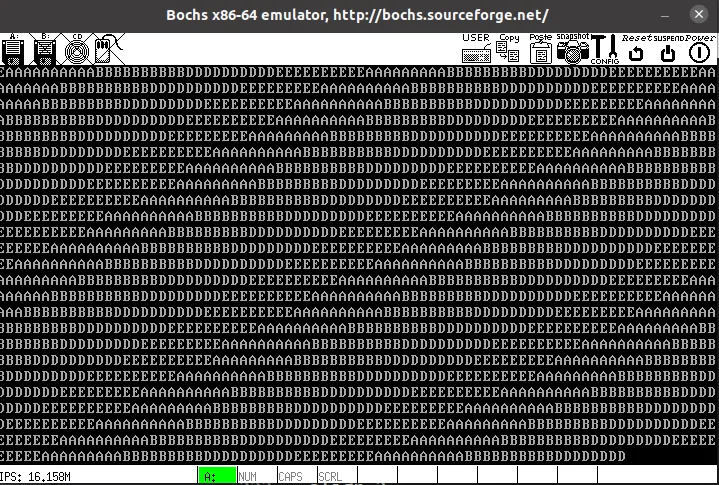
按下键盘的 ABDE 键,分别切换到进程 0123.
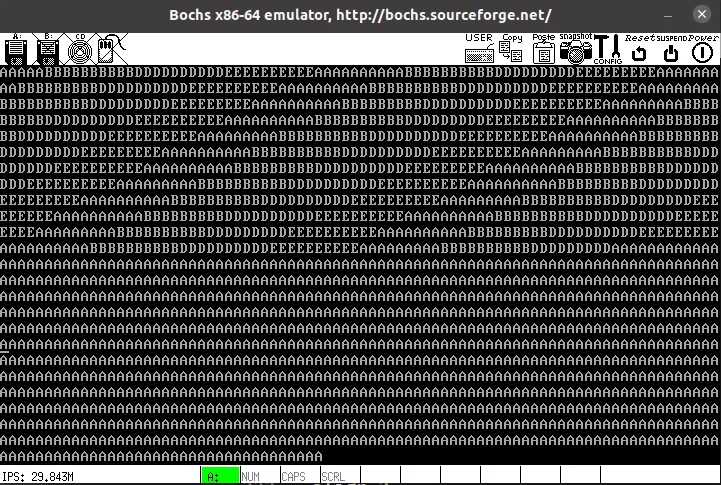
按下键盘的 C 键,恢复到时钟中断轮流调度。
6. 附录:程序代码
6.1. boot.s
! boot.s!! It then loads the system at 0x10000, using BIOS interrupts. Thereafter! it disables all interrupts, changes to protected mode, and calls the
BOOTSEG = 0x07c0 ! BOOT 将会被加载到内存的绝对地址 0x7C00 处SYSSEG = 0x1000 ! system loaded at 0x10000 (65536).SYSLEN = 17 ! sectors occupied.
entry startstart: jmpi go,#BOOTSEG ! (段间)长跳转到 0x7c00 + go(偏移量) 处go: mov ax,cs mov ds,ax mov ss,ax mov sp,#0x400 ! arbitrary value >>512
! ok, we've written the message, nowload_system: mov dx,#0x0000 mov cx,#0x0002 mov ax,#SYSSEG mov es,ax xor bx,bx mov ax,#0x200+SYSLEN int 0x13 jnc ok_loaddie: jmp die
! now we want to move to protected mode ...ok_load: cli ! no interrupts allowed ! 关中断 mov ax, #SYSSEG mov ds, ax ! ds = 0x10000 xor ax, ax mov es, ax ! es = 0x0 mov cx, #0x2000 sub si,si ! ds : si = 0x10000 : 0000 sub di,di ! es : di = 0x00000 : 0000 rep ! 移动内存,0x10000 => 0x00000 movw mov ax, #BOOTSEG mov ds, ax ! ds = 0x7c00 lidt idt_48 ! load idt with 0,0 lgdt gdt_48 ! load gdt with whatever appropriate
! absolute address 0x00000, in 32-bit protected mode. mov ax,#0x0001 ! protected mode (PE) bit lmsw ax ! This is it ! lmsw是加载机器状态字指令,后接16位寄存器或者内存地址 ! 其功能是用源操作数的低4位加载CR0,也就是说仅会影响CR0的低4位——PE, MP, EM, TS。 jmpi 0,8 ! jmp offset 0 of segment 8 (cs)
! 定义了三个段描述符,其中第一个段不可用gdt: .word 0,0,0,0 ! dummy
! 第1个描述符定义了一个代码段,其基地址为0,界限值是0x7FF(10进制2047), ! 粒度4KB,DPL=0,非一致性,可读可执行。因为粒度是4KB,所以段长度是(2047+1)*4KB=8MB .word 0x07FF ! 8Mb - limit=2047 (2048*4096=8Mb) .word 0x0000 ! base address=0x00000 .word 0x9A00 ! code read/exec .word 0x00C0 ! granularity=4096, 386
! 第2个描述符定义了一个数据段,其基地址为0, ! 界限值是0x7FF(10进制2047),粒度4KB,DPL=0,向上扩展,可读可写。段长度是8MB .word 0x07FF ! 8Mb - limit=2047 (2048*4096=8Mb) .word 0x0000 ! base address=0x00000 .word 0x9200 ! data read/write .word 0x00C0 ! granularity=4096, 386
idt_48: .word 0 ! idt limit=0 .word 0,0 ! idt base=0Lgdt_48: .word 0x7ff ! gdt limit=2048, 256 GDT entries .word 0x7c00+gdt,0 ! gdt base = 07xxx.org 510 .word 0xAA556.2. head.s
## head.s contains the 32-bit startup code.## Two L3 task multitasking. The code of tasks are in kernel area,## just like the Linux. The kernel code is located at 0x10000.SCRN_SEL = 0x18 # 显存段TSS0_SEL = 0x20 # 任务状态段 0, 占 8 ByteLDT0_SEL = 0x28 # 局部描述符表 0, 占 8 ByteTSS1_SEL = 0x30 # 任务状态段 1, 占 8 ByteLDT1_SEL = 0x38 # 局部描述符表 1, 占 8 ByteTSS2_SEL = 0x40 # 任务状态段 2, 占 8 ByteLDT2_SEL = 0x48 # 局部描述符表 2, 占 8 ByteTSS3_SEL = 0x50 # 任务状态段 3, 占 8 ByteLDT3_SEL = 0x58 # 局部描述符表 3, 占 8 Byte
.code32.global startup_32.textstartup_32: movl $0x10,%eax mov %ax,%ds## mov %ax,%es lss init_stack,%esp # init_stack => ss:%esp
## setup base fields of descriptors. call setup_idt # 建立 ldt 表 call setup_gdt # 建立 gdt 表 movl $0x10,%eax # reload all the segment registers mov %ax,%ds # after changing gdt. mov %ax,%es mov %ax,%fs mov %ax,%gs # 更改 gdt 表后重载所有段寄存器 lss init_stack,%esp # init_stack => ss:%esp
## setup up timer 8253 chip. 初始化 8253 movb $0x36, %al # 控制字 36H = 00 11 01 10 B movl $0x43, %edx # 控制端口 outb %al, %dx # 通道 0, 16 位, 方式 3(方波), 二进制计数 movl $11930, %eax # timer frequency 100 HZ movl $0x40, %edx # 0 号端口 outb %al, %dx # 将计数数字写入 8253 (8253 是 16 位的) movb %ah, %al # 老师所说的10Hz, 似乎是不能只用一个通道实现的 outb %al, %dx # 因为 119300 > 2^16-1
## setup timer & system call interrupt descriptors. 初始化时钟中断和系统中断 movl $0x00080000, %eax # cs = 0x0008 movw $timer_interrupt, %ax # %eax 中放时钟中断基址 movw $0x8E00, %dx # (?) movl $0x08, %ecx # The PC default timer int. 时钟中断向量号为 08H lea idt(,%ecx,8), %esi # 更改第 8 项中断(每个中断占 8 Byte) movl %eax,(%esi) movl %edx,4(%esi) movw $system_interrupt, %ax # 系统中断基址 movw $0xef00, %dx # 没有做模式切换, 状态没有从 11B 变为 00B (?) movl $0x80, %ecx # 系统中断向量号为 80H lea idt(,%ecx,8), %esi # 更改系统中断 movl %eax,(%esi) movl %edx,4(%esi) movw $keyboard_interrupt, %ax # 键盘中断基址 movw $0x8e00, %dx movl $0x09, %ecx # 键盘中断向量号为 09H lea idt(,%ecx,8), %esi # 更改键盘中断 movl %eax,(%esi) movl %edx,4(%esi)
## unmask the timer interrupt.## movl $0x21, %edx## inb %dx, %al## andb $0xfe, %al## outb %al, %dx
## Move to user mode (task 0) 为启动任务 0 做准备 pushfl # eflags 入栈 andl $0xffffbfff, (%esp) # 置 flag, 中断位清零 popfl movl $TSS0_SEL, %eax ltr %ax # 加载 TSS movl $LDT0_SEL, %eax lldt %ax # 加载 LDT movl $0, current # 准备启动 0 sti # 开中断 pushl $0x17 # 压 ss pushl $init_stack # 压用户栈, init_stack 成为 task0 的用户栈 pushfl # 压 eflag pushl $0x0f # 压 cs, cs 末 2 位为 11B, 即进入 11 用户级(00 为内核级) pushl $task0 # 压 eip iret # 返回时自动弹出, 进入 task0, 因此 tss0 表内容得以初始化
/****************************************/setup_gdt: lgdt lgdt_opcode # 加载 GDT ret
setup_idt: lea ignore_int,%edx # 哑中断基址 => %edx movl $0x00080000,%eax # cs = 0x0008 movw %dx,%ax # selector = 0x0008 = cs movw $0x8E00,%dx # interrupt gate - dpl=0, present lea idt,%edi # 中断向量表基址 => %edi mov $256,%ecx # 循环次数rp_sidt: # %eax 中放了 cs:哑中断基址 movl %eax,(%edi) # 将哑中断门描述符存入表中 movl %edx,4(%edi) addl $8,%edi dec %ecx jne rp_sidt # 将 256 个中断全部置为哑中断 lidt lidt_opcode # 加载中断描述符表寄存器值 ret
## -----------------------------------write_char: push %gs # 保存现场 pushl %ebx## pushl %eax mov $SCRN_SEL, %ebx # 显存的段选择子 mov %bx, %gs # 放入 %gs mov scr_loc, %bx # %bx 中放光标位移(其实是偏移) shl $1, %ebx # 左移, 写高字节(高字节表示 ASCII 码值) movb %al, %gs:(%ebx) # 将 %al 的内容写到光标处 shr $1, %ebx # 右移恢复 incl %ebx # 指针后移 cmpl $2000, %ebx # 与 2000 相比 jb 2f # 如果 ebx < 2000, 则跳转到 2f call roll_screen movl $1920, %ebx # 最下面一行的行首2: movl %ebx, scr_loc # 直接将 ebx 赋值给 scr_loc, 返回## popl %eax popl %ebx # 恢复现场 pop %gs ret
.align 2roll_screen: # ebx >= 2000 时, 将屏幕上的字符向上滚动 push %ds mov $SCRN_SEL, %ebx # 获取显存段地址(0xb8000) mov %bx, %ds mov %bx, %es movl $160, %ebx movl %ebx, %esi # DS:esi (源地址) movl $0, %ebx movl %ebx, %edi # ES:edi (目的地址)
movl $1920, %ecx # 循环次数 cld # 清除增量位(向后移动, 即 si = si + 2, di = di + 2) rep movsw # 使用 rep 指令前缀, 用 movw 搬动字符 # 将最下面一行清空 movl $80, %ecx pushl %eax movl $0x0700, %eax # 背景色黑, 前景色白, 字符为 00H cld rep stosw # 将 ax 寄存器的内容送到 di 指向的单元中 popl %eax pop %ds ret
/***********************************************//* This is the default interrupt "handler" :-) */.align 2ignore_int: # 哑中断 push %ds # 保护现场 pushl %eax movl $0x10, %eax mov %ax, %ds # 使用 gdt 表的第 2 项 movl $67, %eax # print 'C' call write_char # 调用 write_char popl %eax # 恢复现场 pop %ds iret
/* Timer interrupt handler */.align 2timer_interrupt: # 时钟中断 (TODO) push %ds pushl %eax # 保护现场 movl $0x10, %eax mov %ax, %ds # 使用 gdt 表的第 2 项 movb $0x20, %al # 8259A outb %al, $0x20 # 恢复中断
movl $0, %eax # 将 key_en 与 false 比较 cmpl %eax, key_en # 若相等,则使用默认的轮流调度 jne 5f # 否则使得某个进程单独被调度(跳出时钟中断处理程序)
movl $0, %eax cmpl %eax, current # 判断当前进程是否为 0 je 1f # 为 0 则跳到 1 处, 切换为进程 1
movl $1, %eax cmpl %eax, current # 判断当前进程是否为 1 je 2f # 为 1 则跳到 2 处, 切换为进程 2
movl $2, %eax cmpl %eax, current # 判断当前进程是否为 2 je 3f # 为 2 则跳到 3 处, 切换为进程 3
movl $3, %eax cmpl %eax, current # 判断当前进程是否为 3 je 4f # 为 3 则跳到 4 处, 切换为进程 0
1: movl $1, current # 设置进程为 1 ljmp $TSS1_SEL, $0 # 跳转到进程 1, 存下当前快照 jmp 5f2: movl $2, current # 设置进程为 2 ljmp $TSS2_SEL, $0 # 跳转到进程 2, 存下当前快照 jmp 5f3: movl $3, current # 设置进程为 3 ljmp $TSS3_SEL, $0 # 跳转到进程 3, 存下当前快照 jmp 5f4: movl $0, current # 设置进程为 0 ljmp $TSS0_SEL, $0 # 跳转到进程 0, 存下当前快照5: popl %eax # 恢复现场 pop %ds iret
/* system call handler */.align 2system_interrupt: # 系统中断 push %ds # 保护现场 pushl %edx pushl %ecx pushl %ebx pushl %eax movl $0x10, %edx mov %dx, %ds # 使用 gdt 表的第 2 项 cli # 关中断 call write_char # 写字符 sti # 开中断 popl %eax # 恢复现场 popl %ebx popl %ecx popl %edx pop %ds iret
## 键盘中断.align 2keyboard_interrupt: pushl %edx # 保护现场 pushl %ecx pushl %ebx pushl %eax push %ds push %es
movl $0x10, %eax # 将 ds, es 设置为内核数据段 mov %ax, %ds mov %ax, %es
movb $0x20, %al # 发出 8259 中断结束信号 outb %al, $0x20
xorb %al, %al # 清除标志位 inb $0x60, %al # 读取端口 cmpb $0x1e, %al # 与 A 的键码比较 je 1f cmpb $0x30, %al # 与 B 的键码比较 je 2f cmpb $0x20, %al # 与 D 的键码比较 je 3f cmpb $0x12, %al # 与 E 的键码比较 je 4f cmpb $0x2e, %al # 与 C 的键码比较 je 5f jmp 6f # 这句非常迷惑,但相当关键,相当于 switch 中的 default # 作用是在默认情况下直接退出键盘中断处理程序,否则会默认继续执行下面的程序1: call set_e0 # 切换到进程 0 jmp 6f2: call set_e1 # 切换到进程 1 jmp 6f3: call set_e2 # 切换到进程 2 jmp 6f4: call set_e3 # 切换到进程 3 jmp 6f5: call set_cl # 切换回分时调度6: pop %es # 恢复现场 pop %ds popl %eax popl %ebx popl %ecx popl %edx iret
## 处理键盘按下后的程序## 注意:当前的进程为 0 时,不能重新调度为进程 0## 也就是说,不用 ljmp 指令来使得进程重新跳回自己
.align 8set_e0: movl $1, key_en # 强制进入键盘中断 cmpl $0, current # 判断当前进程是否为 0 je 1f # 若是,则无需进行进程调度 movl $0, current # 指定当前进程为 0 ljmp $TSS0_SEL, $0 # 调度到进程 01: ret
.align 8set_e1: movl $1, key_en # 强制进入键盘中断 cmpl $1, current # 判断当前进程是否为 1 je 1f # 若是,则无需进行进程调度 movl $1, current # 指定当前进程为 1 ljmp $TSS1_SEL, $0 # 调度到进程 11: ret
.align 8set_e2: movl $1, key_en # 强制进入键盘中断 cmpl $2, current # 判断当前进程是否为 2 je 1f # 若是,则无需进行进程调度 movl $2, current # 指定当前进程为 2 ljmp $TSS2_SEL, $0 # 调度到进程 21: ret
.align 8set_e3: movl $1, key_en # 强制进入键盘中断 cmpl $3, current # 判断当前进程是否为 3 je 1f # 若是,则无需进行进程调度 movl $3, current # 指定当前进程为 3 ljmp $TSS3_SEL, $0 # 调度到进程 31: ret
.align 8set_cl: movl $0, key_en # 强制退出键盘中断 ret
/*********************************************/current:.long 0 # 当前进程scr_loc:.long 0 # 光标位置key_en:.long 0 # 处于键盘中断对应的进程中
.align 2lidt_opcode: .word 256*8-1 # idt contains 256 entries 256 个中断入口 .long idt # This will be rewrite by code.lgdt_opcode: .word (end_gdt-gdt)-1 # so does gdt .long gdt # This will be rewrite by code.
.align 8idt: .fill 256,8,0 # idt is uninitialized 256 个中断
gdt: .quad 0x0000000000000000 # NULL descriptor # 第 0 号不用 .quad 0x00c09a00000007ff # 8Mb 0x08, base = 0x00000 # 第 1 号只读代码段 .quad 0x00c09200000007ff # 8Mb 0x10 # 第 2 号可读可写数据段 .quad 0x00c0920b80000002 # screen 0x18 - for display # 第 3 号为显存
.word 0x0068, tss0, 0xe900, 0x0 # TSS0 descr 0x20 .word 0x0040, ldt0, 0xe200, 0x0 # LDT0 descr 0x28 .word 0x0068, tss1, 0xe900, 0x0 # TSS1 descr 0x30 .word 0x0040, ldt1, 0xe200, 0x0 # LDT1 descr 0x38 .word 0x0068, tss2, 0xe900, 0x0 # TSS2 descr 0x40 .word 0x0040, ldt2, 0xe200, 0x0 # LDT2 descr 0x48 .word 0x0068, tss3, 0xe900, 0x0 # TSS2 descr 0x50 .word 0x0040, ldt3, 0xe200, 0x0 # LDT2 descr 0x58end_gdt: .fill 128,4,0init_stack: # Will be used as user stack for task0. .long init_stack .word 0x10
/*************************************/.align 8ldt0: .quad 0x0000000000000000 # 0 号不用 .quad 0x00c0fa00000003ff # 0x0f, base = 0x00000, 1 号只读 .quad 0x00c0f200000003ff # 0x17 2 号可读可写
tss0: .long 0 /* back link */ .long krn_stk0, 0x10 /* esp0, ss0 */ .long 0, 0, 0, 0, 0 /* esp1, ss1, esp2, ss2, cr3 */ .long 0, 0, 0, 0, 0 /* eip, eflags, eax, ecx, edx */ .long 0, 0, 0, 0, 0 /* ebx esp, ebp, esi, edi */ .long 0, 0, 0, 0, 0, 0 /* es, cs, ss, ds, fs, gs */ .long LDT0_SEL, 0x8000000 /* ldt 段选择符, trace bitmap */
.fill 128,4,0krn_stk0:## .long 0
/************************************/.align 8ldt1: .quad 0x0000000000000000 # 0 号不用 .quad 0x00c0fa00000003ff # 0x0f, base = 0x00000, 1 号只读 .quad 0x00c0f200000003ff # 0x17 2 号可读可写
tss1: .long 0 /* back link */ .long krn_stk1, 0x10 /* esp0, ss0 */ .long 0, 0, 0, 0, 0 /* esp1, ss1, esp2, ss2, cr3 */ .long task1, 0x200 /* eip, eflags */ .long 0, 0, 0, 0 /* eax, ecx, edx, ebx */ .long usr_stk1, 0, 0, 0 /* esp, ebp, esi, edi */ .long 0x17,0x0f,0x17,0x17,0x17,0x17 /* es, cs, ss, ds, fs, gs */ .long LDT1_SEL, 0x8000000 /* ldt 段选择符, trace bitmap */
.fill 128,4,0krn_stk1:
/************************************/.align 8ldt2: .quad 0x0000000000000000 # 0 号不用 .quad 0x00c0fa00000003ff # 0x0f, base = 0x00000, 1 号只读 .quad 0x00c0f200000003ff # 0x17 2 号可读可写
tss2: .long 0 /* back link */ .long krn_stk2, 0x10 /* esp0, ss0 */ .long 0, 0, 0, 0, 0 /* esp1, ss1, esp2, ss2, cr3 */ .long task2, 0x200 /* eip, eflags */ .long 0, 0, 0, 0 /* eax, ecx, edx, ebx */ .long usr_stk2, 0, 0, 0 /* esp, ebp, esi, edi */ .long 0x17,0x0f,0x17,0x17,0x17,0x17 /* es, cs, ss, ds, fs, gs */ .long LDT2_SEL, 0x8000000 /* ldt 段选择符, trace bitmap */
.fill 128,4,0krn_stk2:
/************************************/.align 8ldt3: .quad 0x0000000000000000 # 0 号不用 .quad 0x00c0fa00000003ff # 0x0f, base = 0x00000, 1 号只读 .quad 0x00c0f200000003ff # 0x17 2 号可读可写
tss3: .long 0 /* back link */ .long krn_stk3, 0x10 /* esp0, ss0 */ .long 0, 0, 0, 0, 0 /* esp1, ss1, esp2, ss2, cr3 */ .long task3, 0x200 /* eip, eflags */ .long 0, 0, 0, 0 /* eax, ecx, edx, ebx */ .long usr_stk3, 0, 0, 0 /* esp, ebp, esi, edi */ .long 0x17,0x0f,0x17,0x17,0x17,0x17 /* es, cs, ss, ds, fs, gs */ .long LDT3_SEL, 0x8000000 /* ldt 段选择符, trace bitmap */
.fill 128,4,0krn_stk3:
/************************************/task0: movl $0x17, %eax movw %ax, %ds # 使用 ldt 表的第 2 项 mov $65, %al # %al 中放入 A 的 ASCII 码 int $0x80 # 调用系统中断, 输出字符 movl $0xfff, %ecx1: loop 1b # 延迟 jmp task0
task1: movl $0x17, %eax movw %ax, %ds # 使用 ldt 表的第 2 项 mov $66, %al # %al 中放入 B 的 ASCII 码 int $0x80 # 调用系统中断, 输出字符 movl $0xfff, %ecx1: loop 1b # 延迟 jmp task1
task2: movl $0x17, %eax movw %ax, %ds # 使用 ldt 表的第 2 项 mov $68, %al # %al 中放入 D 的 ASCII 码 int $0x80 # 调用系统中断, 输出字符 movl $0xfff, %ecx1: loop 1b # 延迟 jmp task2
task3: movl $0x17, %eax movw %ax, %ds # 使用 ldt 表的第 2 项 mov $69, %al # %al 中放入 E 的 ASCII 码 int $0x80 # 调用系统中断, 输出字符 movl $0xfff, %ecx1: loop 1b # 延迟 jmp task3
.fill 128,4,0usr_stk1: .fill 128,4,0usr_stk2: .fill 128,4,0usr_stk3:6.3. makefile
## Makefile for the simple example kernel.AS86 =as86 -0 -aLD86 =ld86 -0AS =as --32LD =ldLDFLAGS =-m elf_i386 -Ttext 0 -e startup_32 -s -x -M
all: Image
Image: boot system dd bs=32 if=boot of=Image skip=1 objcopy -O binary system head cat head >> Image
disk: Image dd bs=8192 if=Image of=/dev/fd0 sync;sync;sync
head.o: head.s
system: head.o $(LD) $(LDFLAGS) head.o -o system > System.map
boot: boot.s $(AS86) -o boot.o boot.s $(LD86) -s -o boot boot.o
clean: rm -f System.map core boot head *.o system6.4. bochs_linux00.bxrc
romimage: file=$BXSHARE/BIOS-bochs-latestvgaromimage: file=$BXSHARE/VGABIOS-lgpl-latestmegs: 16floppya: 1_44="Image", status=insertedboot: alog: bochsout.txt